
Apprenez à configurer et optimiser un régulateur PID sur Siemens TIA Portal. Ce guide pédagogique explique les concepts de Proportionnel, Intégral et Dérivé avec des exemples concrets pour l'industrie.
Introduction à la régulation PID
Imaginez que vous essayez de maintenir une voiture à exactement 90 km/h sur une route vallonnée.
Si vous appuyez sur l'accélérateur que lorsque vous descendez en dessous de 90, votre vitesse va osciller sans cesse.
C'est ici qu'intervient le PID (Proportionnel, Intégral, Dérivé).
Dans le monde industriel, le PID est le cerveau qui permet de stabiliser automatiquement une température, un débit ou une pression avec une précision chirurgicale.
Le but ultime d'un régulateur est de réduire l'écart entre ce que vous voulez (la consigne) et ce que vous avez réellement (la mesure).
Que ce soit pour chauffer une cuve de chocolat ou remplir un réservoir d'eau, le PID calcule en permanence la correction nécessaire pour atteindre la cible le plus rapidement possible, sans dépasser les limites de sécurité de votre installation.
Comprendre les trois actions : P, I et D
L'action Proportionnelle (P) est la réaction immédiate, plus l'écart entre la consigne et la mesure est grand, plus le régulateur réagit fort.
C'est comme ouvrir un robinet : si le seau est vide, vous l'ouvrez à fond ; s'il est presque plein, vous commencez à le fermer.
Cependant, l'action P à elle seule ne suffit jamais car elle laisse toujours une petite erreur résiduelle.
L'action Intégrale (I) regarde vers le passé.
Elle additionne l'erreur qui persiste dans le temps.
Si l'action P n'arrive pas à combler les derniers millimètres d'un niveau d'eau, l'action I va s'impatienter et augmenter progressivement la puissance pour éliminer totalement l'erreur.
C'est l'outil indispensable pour la précision finale.
L'action Dérivée (D) regarde vers le futur. Elle anticipe la vitesse à laquelle la mesure change.
Si la température monte trop vite, l'action D va freiner la chauffe avant même d'avoir atteint la consigne pour éviter de la dépasser.
C'est un peu comme freiner doucement avant un virage serré pour ne pas sortir de la route.
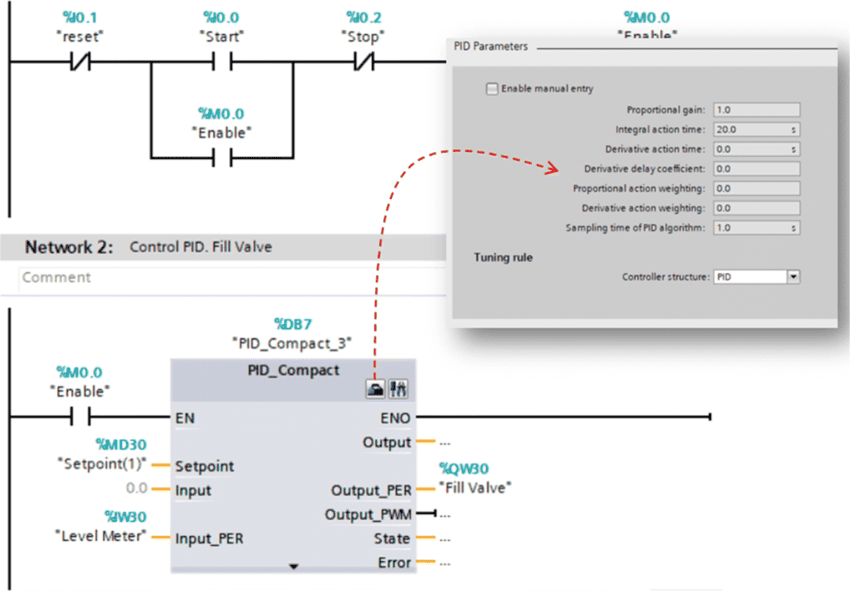
Configuration du bloc PID_Compact dans TIA Portal
Dans l'univers Siemens, le bloc standard pour la régulation continue est le PID_Compact.
Pour l'utiliser, il faut l'insérer dans un bloc d'interruption cyclique (généralement l'OB30).
Pourquoi ? Parce qu'un PID doit calculer ses corrections à des intervalles de temps réguliers et précis (par exemple toutes les 100ms) pour rester stable.
Les entrées principales à connaître sont Setpoint (SP) pour votre consigne, et Input (ou Input_PER) pour votre mesure provenant d'un capteur.
La sortie Output (ou Output_PER) commande votre actionneur, il est crucial de bien renseigner les limites de votre système dans la configuration du bloc pour éviter que l'automate ne commande une puissance impossible à fournir par votre machine.
// Exemple d'appel du PID_Compact dans un OB cyclique
"PID_Temp_DB"(
Setpoint := "Data".Consigne_Temperature,
Input_PER := "Capteur_PT100",
Output_PER => "Sortie_Resistance",
RunModeByStartup := TRUE
);Cas pratique 1 : la régulation de température
Prenons une cuve que nous voulons maintenir à 60°C.
Nous utilisons une sonde PT100 reliée à une entrée analogique de l'automate, l'actionneur est une résistance chauffante, dans TIA Portal, nous configurons le type de régulation sur Température et l'unité sur °C'.
Cela permet au logiciel d'adapter ses algorithmes internes à l'inertie thermique, qui est souvent lente.
Lors de la mise en service, nous commençons par tester le système en mode manuel.
On envoie 20% de puissance et on observe si la température monte, une fois que l'on est sûr du câblage, on lance l'auto-réglage (Tuning).
Le PID va alors faire de petits sauts de puissance pour apprendre comment la cuve réagit et calculer tout seul les meilleurs coefficients P, I et D.
Cas pratique 2 : la régulation de niveau
Ici, l'objectif est de garder un niveau d'eau constant malgré des soutirages aléatoires.
On utilise un capteur ultrason (0-10V) et une pompe à vitesse variable, contrairement à la température, le niveau réagit souvent très vite, le paramétrage devra être plus nerveux pour compenser rapidement les baisses de niveau.
Il est vital de bien configurer la mise à l'échelle, si votre capteur renvoie une valeur entre 0 et 27648 (standard Siemens), le bloc PID doit savoir que cela correspond à 0-200 cm.
Une erreur d'échelle ici rendrait la régulation totalement erratique ou instable, car le PID ne comprendrait pas l'impact réel de ses actions sur le niveau physique.
Méthode de réglage simple pour débutants
Si vous devez régler le PID manuellement, suivez cette séquence :
Commencez par le gain (P), augmentez le jusqu'à ce que le système commence à osciller, puis divisez cette valeur par deux.
Vous avez une base stable mais avec une erreur, ensuite, introduisez l'action Intégrale (I) petit à petit pour ramener la mesure exactement sur la consigne.
L'action Dérivée (D) est souvent laissée à zéro pour les débutants, car elle est très sensible aux parasites électriques sur les câbles des capteurs.
Un D trop fort fera trembler votre actionneur sans raison apparente, retenez bien : un système trop lent a besoin de plus de P ou moins de I, un système qui oscille trop a besoin de moins de P ou de plus de I.
Erreurs fréquentes et solutions
L'erreur la plus classique est d'appeler le bloc PID dans le cycle principal (OB1), comme le temps de cycle de l'OB1 change tout le temps, les calculs du PID deviennent faux.
Utilisez toujours un OB d'interruption cyclique.
Une autre erreur est d'oublier de configurer les limites de la sortie (LMN_LIMIT).
Si votre vanne ne s'ouvre qu'entre 20% et 80%, vous devez le dire au PID pour qu'il ne s'épuise pas à essayer d'ouvrir à 100%.
Enfin, faites attention à la saturation intégrale (anti-windup).
Si votre système est bloqué mécaniquement, l'action I va continuer à monter jusqu'au maximum.
Quand le blocage disparaît, le système s'emballe, heureusement, le bloc PID_Compact de TIA Portal gère cela automatiquement si vous restez dans ses paramètres par défaut.
Conclusion
La régulation PID dans TIA Portal n'est pas une science obscure réservée aux mathématiciens, c'est un outil logique qui demande simplement de la méthode et de l'observation.
En utilisant le bloc PID_Compact et les outils d'auto-réglage intégrés, vous pouvez stabiliser la majorité des processus industriels courants en quelques clics.
N'oubliez jamais de tester vos réglages en conditions réelles et de consulter la Documentation technique Siemens pour les cas les plus complexes.
Pour planifier votre matériel, le TIA Selection Tool reste votre meilleur allié.
Bonne régulation !